

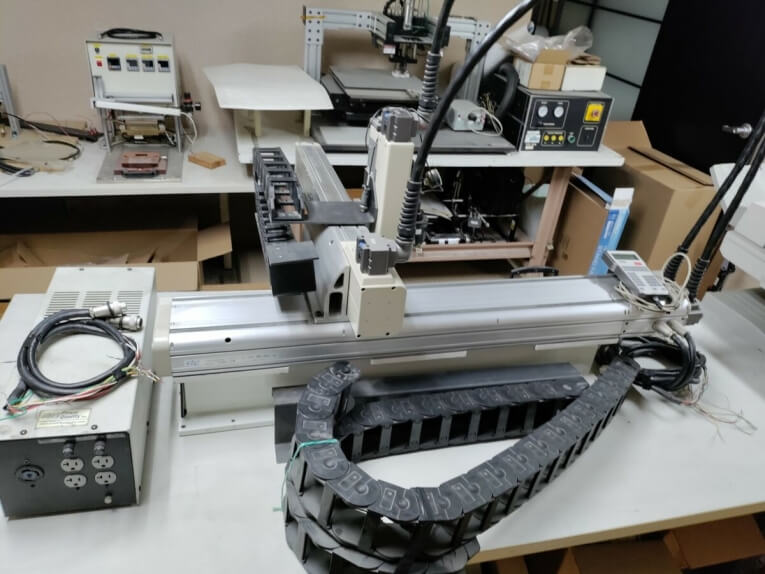
Робат з дэкартавымі каардынатамі таксама называюць прамалінейным робатам або робатам XYZ сферычнай канфігурацыі, таму што ён абсталяваны трыма слізгальнымі злучэннямі для зборкі восяў XYZ. Рух рукі робата з выкарыстаннем дэкартавай канфігурацыі можна апісаць трыма перасякальнымі перпендыкулярнымі прамымі, якія называюцца восямі X, Y і Z. У канфігурацыі дэкартавых каардынат рука робата рухаецца наступным чынам:
1. Лінейны рух, які дазваляе вертыкальна падымаць руку з-за аднаго лінейнага сустава.
2. Два слізгальныя руху, перпендыкулярныя адзін аднаму з-за двух артаганальных суставаў.
Гэты канфігурацыйны робат будзе апрацоўваць у прамавугольнай працоўнай прасторы з дапамогай гэтых трох шарнірных рухаў. Паколькі рух рукі можа пачынацца і спыняцца адначасова па ўсіх трох восях, рух наканечніка інструмента больш плаўны. Гэта дазваляе робату рухацца непасрэдна да прызначанай кропкі, а не ісці па траекторыях, паралельных кожнай восі.
Перавагі дэкартавай канфігурацыі робата
Дэкартава канфігурацыя робата мае наступныя перавагі:
1. Ён мае высокую грузападымальнасць.
2. Ён забяспечвае жорсткую структуру, а таксама высокую ступень механічнай калянасці і дакладнасці.
3. Ён можа вырабляць высокую паўтаранасць з найменшымі памылкамі і з добрай хуткасцю.
Абмежаванні дэкартавай канфігурацыі робата
Дэкартава канфігурацыя робата мае наступныя абмежаванні:
1. Ён мае невялікі і прамавугольны працоўны канверт.
2. Мае паніжаную гнуткасць.
Прымяненне дэкартавай канфігурацыі робата
Канфігурацыя дэкартавых каардынат знаходзіць прымяненне ў аперацыях кантролю, зборкі, механічнай апрацоўкі, зваркі, аздаблення і г. д. Гэтая канфігурацыя таксама атрымала назву Gantry Robot, паколькі яна здольная несці вялікія нагрузкі дзякуючы сваёй жорсткай канструкцыі і гэтай цяжкасці. магутнасць не адрозніваецца ў розных месцах у межах працоўнага канверта.